bot ball

1.) The assignment is to get as many balls over the wall until your side has no more balls versing another bot.
2.) The research we did before staring was that we need a good base with a strong arm.
3.) First we mad a bot then we modified it according to the flaws then we made the controls for our bot to move and then we battled the bot versing another bot.
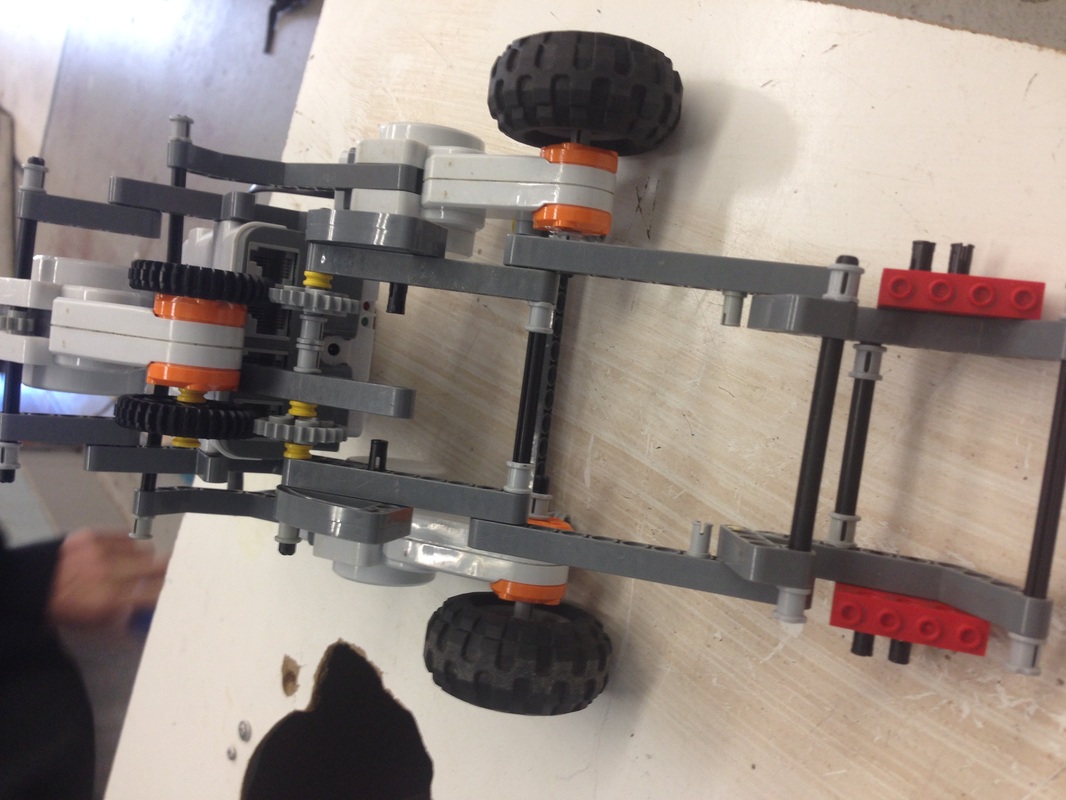
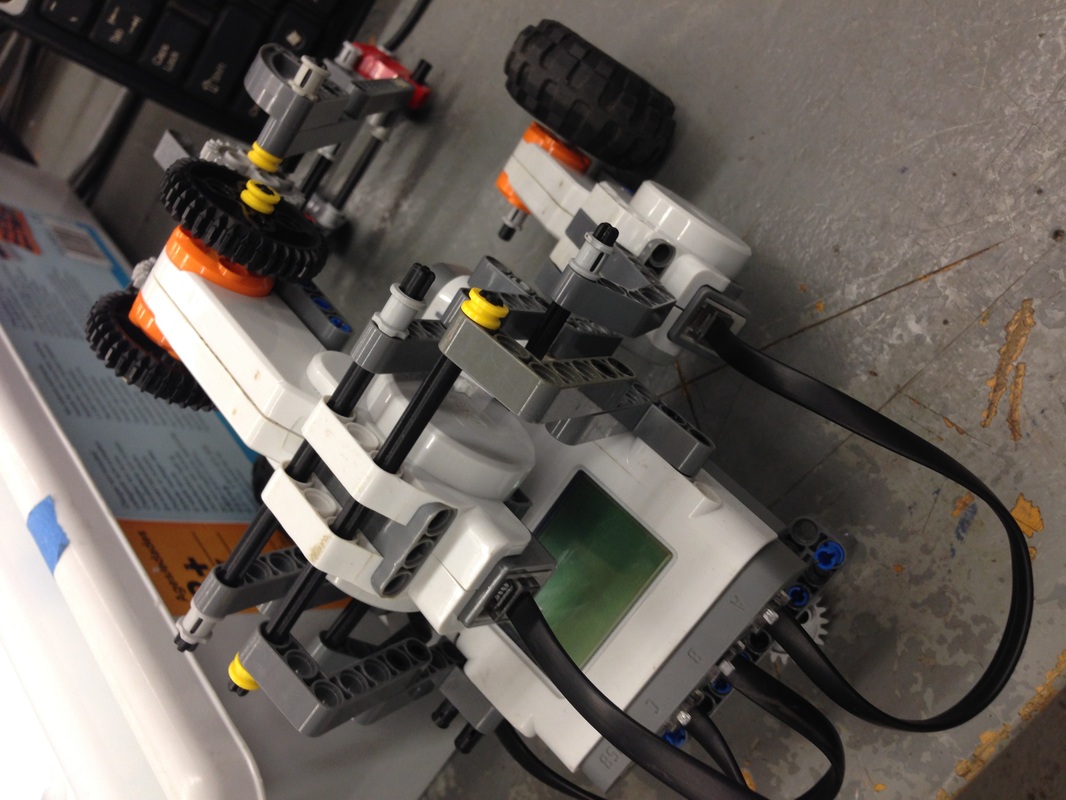
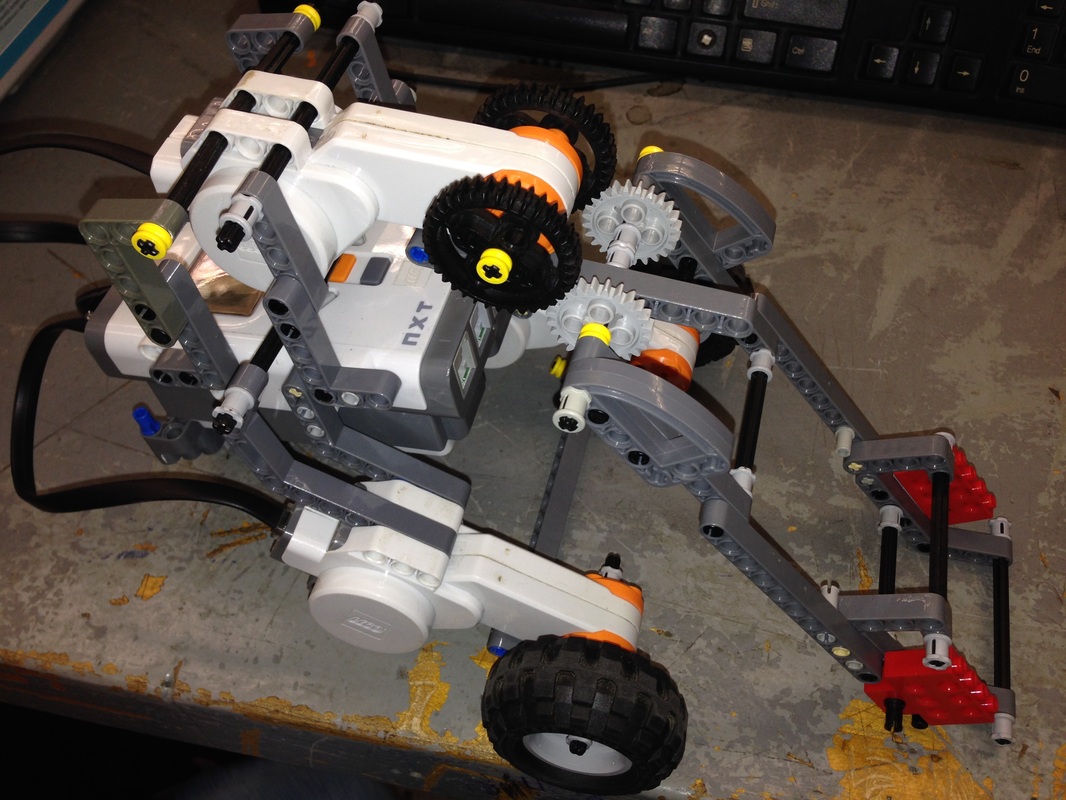
4.) Our bot is a two wheeled ball tossing machine, its held up by a smooth rounded platform in the back which allows it to slide on the ground and turn with ease it also has a motor on top to control the arm to pick up and trow the balls.
5.) The main issue was that the bots arm is a little to heavy and some times gets stuck on walls and makes our bot flip over. we try and move the arm up and down to flip the bot back over but that failed.
6.) I learned that you can control the robot with the key board instead of always programming the bot over and over again.
7.) If i were to do this assignment again then i would have probably tried to control the bot with my phone instead of the key board.
2.) The research we did before staring was that we need a good base with a strong arm.
3.) First we mad a bot then we modified it according to the flaws then we made the controls for our bot to move and then we battled the bot versing another bot.
4.) Our bot is a two wheeled ball tossing machine, its held up by a smooth rounded platform in the back which allows it to slide on the ground and turn with ease it also has a motor on top to control the arm to pick up and trow the balls.
5.) The main issue was that the bots arm is a little to heavy and some times gets stuck on walls and makes our bot flip over. we try and move the arm up and down to flip the bot back over but that failed.
6.) I learned that you can control the robot with the key board instead of always programming the bot over and over again.
7.) If i were to do this assignment again then i would have probably tried to control the bot with my phone instead of the key board.
FINISHED bot


battle videos
|
|
|
|
|
|
